GROUND ROBOTICS
2025
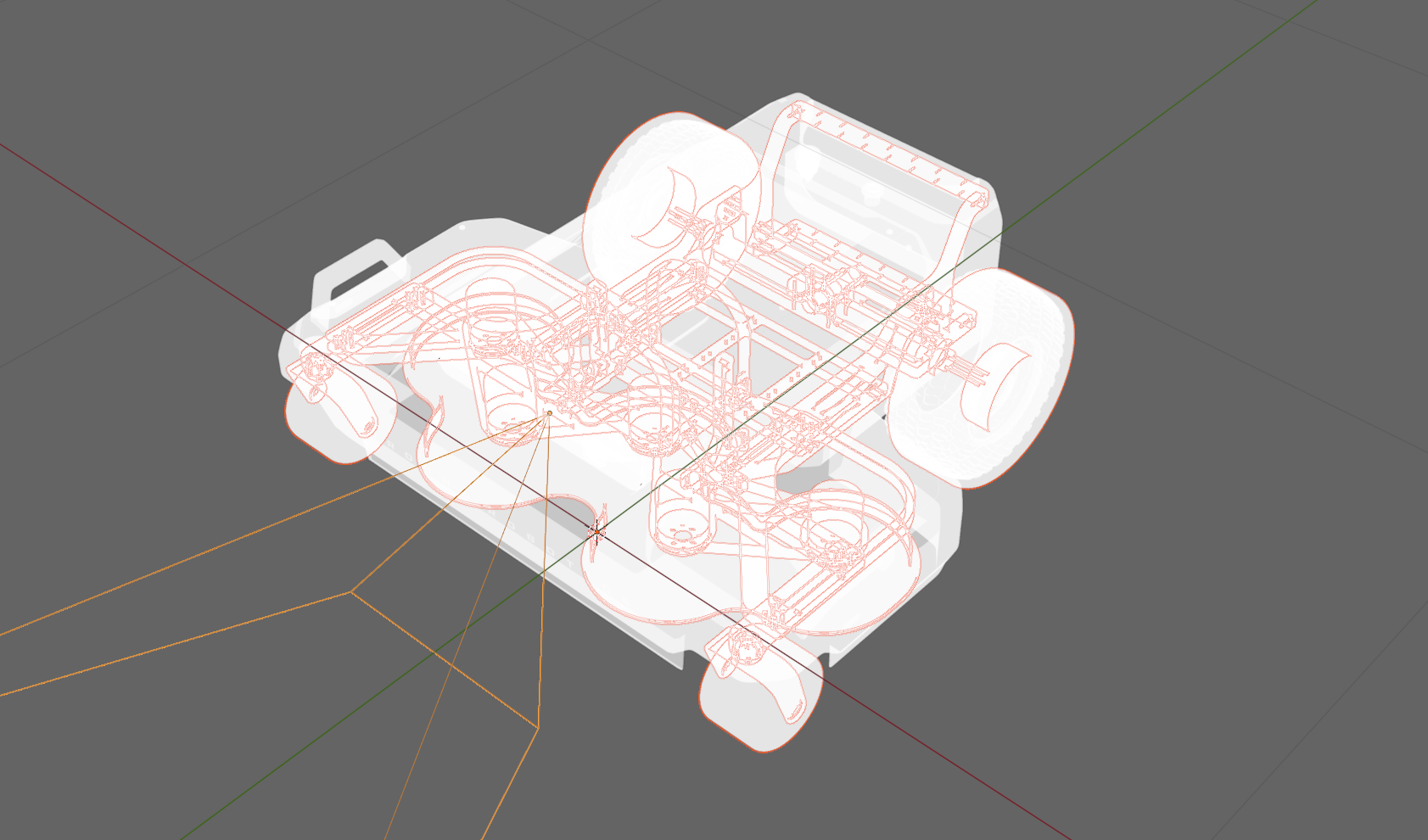
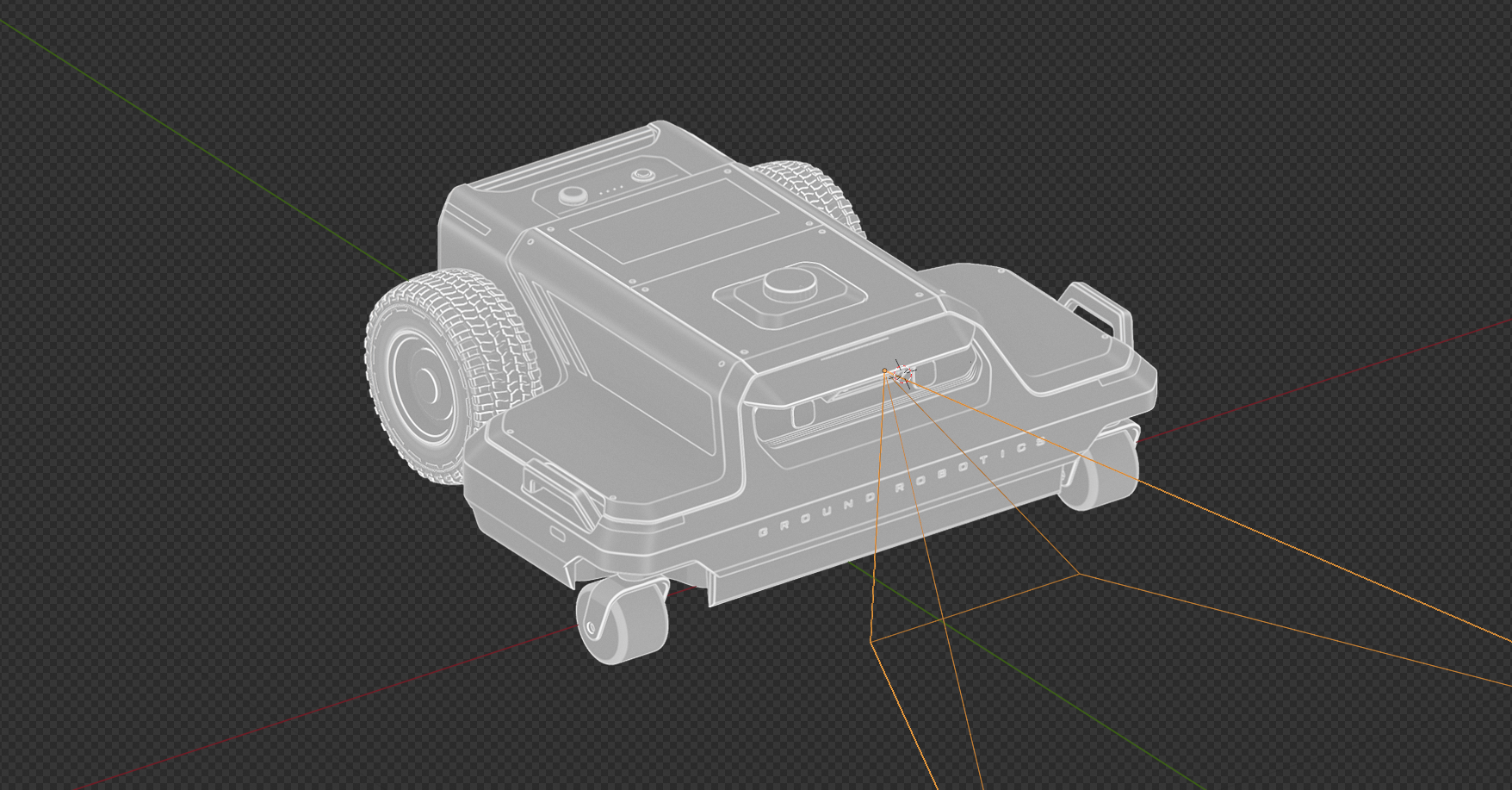
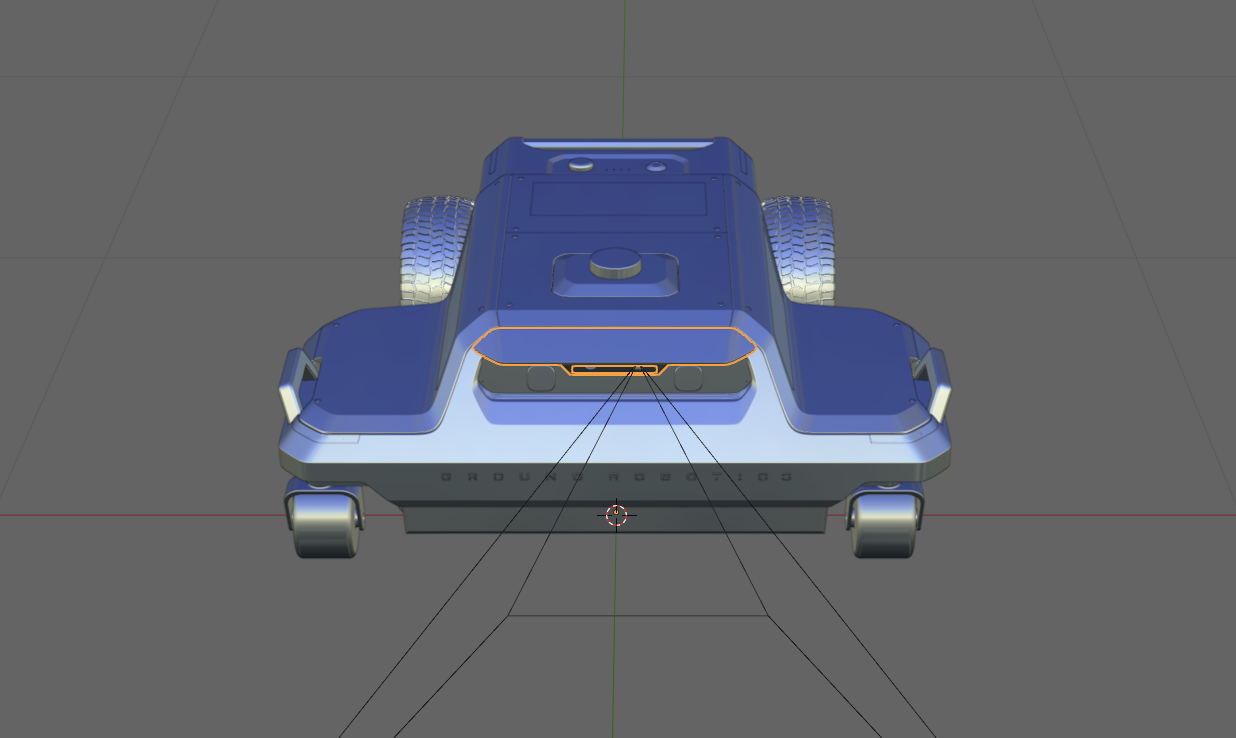
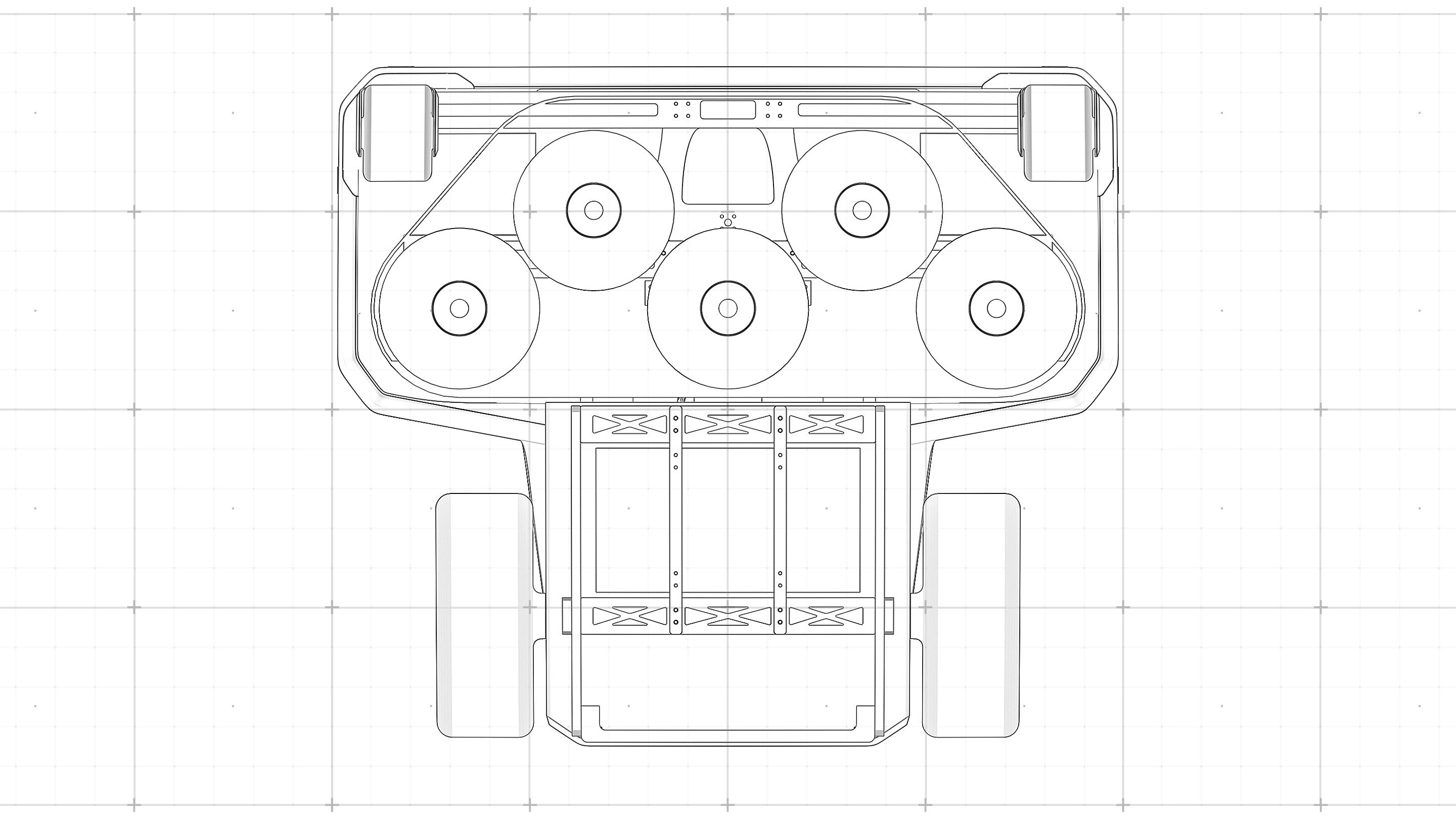
Ground Robotics is a Bay Area startup founded by three robotics engineers, building the G1 — an autonomous commercial mower designed to bring efficiency, intelligence, and safety to large-scale turf care. With the goal of reducing labor shortages and improving consistency, the G1 delivers a worry-free solution for golf courses, sports fields, and other expansive landscapes.


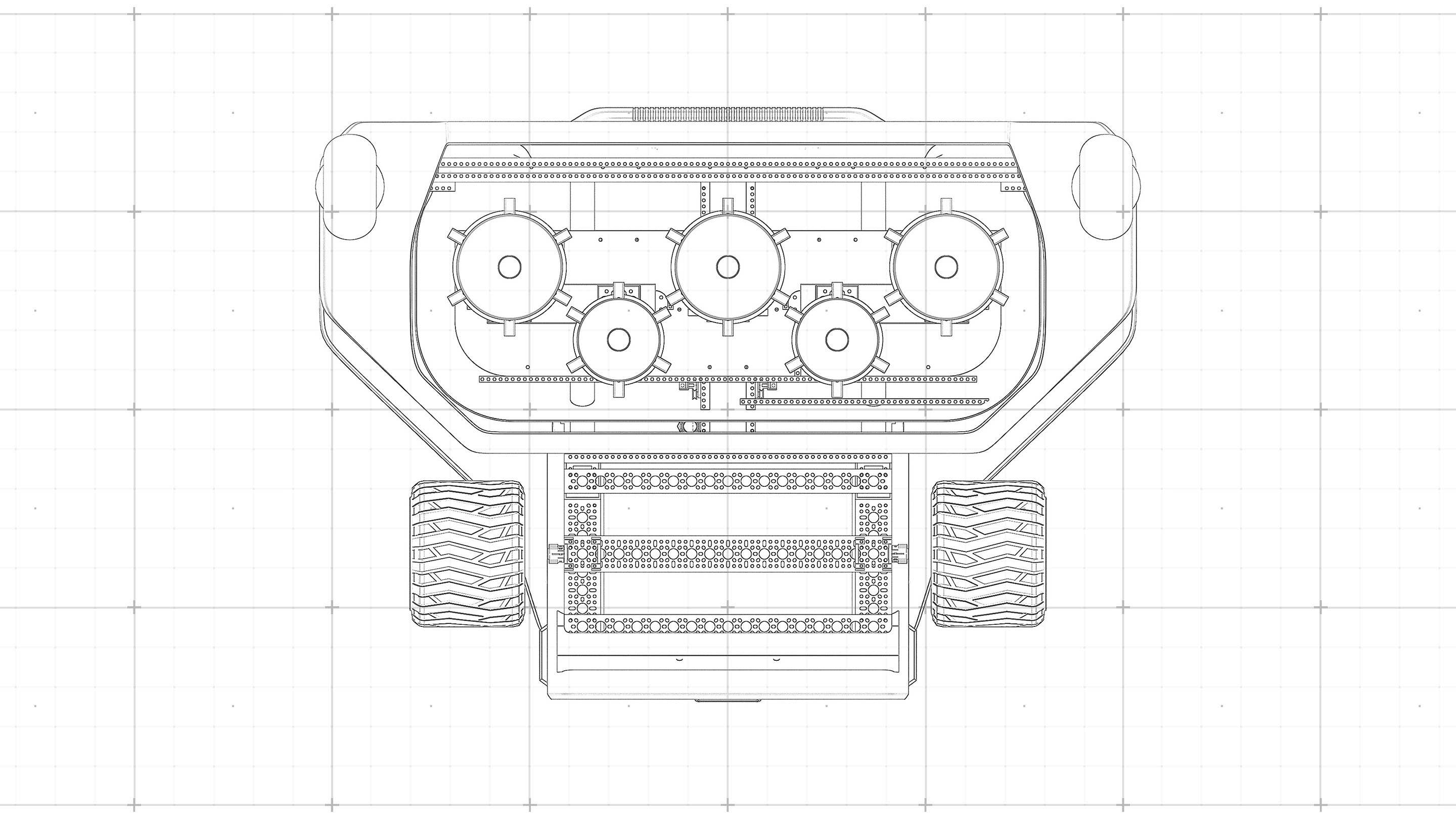
The G1 mows up to 8 acres per day with a 36-inch deck and adjustable cutting height from 0.5 to 3 inches. It uses stereo vision and RTK GPS for precise navigation, even in weak GPS areas, and generates turf health and weed maps with every pass. Designed for real-world use, it offers quick battery swaps, fast blade changes, and simple cleaning, while built-in safety and anti-theft systems ensure reliable and secure operation.